Abstract
The presence of objects that are confusingly similar to the tracked target, poses a fundamental challenge in appearance-based visual tracking. Such distractor objects are easily misclassified as the target itself, leading to eventual tracking failure. While most methods strive to suppress distractors through more powerful appearance models, we take an alternative approach.
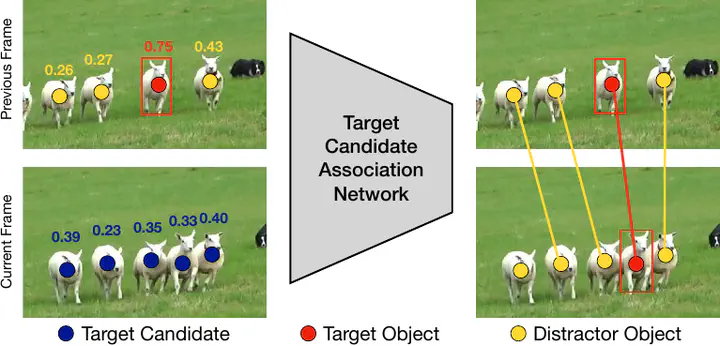
We propose to keep track of distractor objects in order to continue tracking the target. To this end, we introduce a learned association network, allowing us to propagate the identities of all target candidates from frame-to-frame. To tackle the problem of lacking ground-truth correspondences between distractor objects in visual tracking, we propose a training strategy that combines partial annotations with self-supervision. We conduct comprehensive experimental validation and analysis of our approach on several challenging datasets. Our tracker sets a new state-of-the-art on six benchmarks, achieving an AUC score of 67.2% on LaSOT and a +6.1% absolute gain on the OxUvA long-term dataset.