Biography
I am senior computer vision research engineer at the 3D Vision group at Apple, where I am building a team working on 3D computer vision at a global scale. Previously, I was a research group leader at ETH Zurich and founder of Elevate3D. I received my Ph.D. degree from Linköping University, Sweden in 2018. My thesis “Visual Tracking” was awarded the biennial Best Nordic Thesis Prize.
Hiring: I am looking for very talented researchers and engineers in computer vision and machine learning to join our group at Apple. Contact me if you are interested!
News:
- Joined Apple in Nov. 2023.
- Three NeurIPS 2023 papers accepted.
- Three ICCV 2023 papers accepted.
Selected Publications
NeurIPS 2023
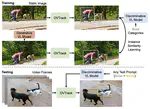
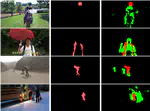
Extending Segment Anything (SAM) to achieve pixel-accurate segmentations of any object.
Extending Segment Anything (SAM) to achieve pixel-accurate segmentations of any object.








































Co-supervised PhD Students
Siyuan Li
PhD Student, ETH Zurich
Prune Truong
PhD Student, ETH Zurich
Mohamad Shahbazi
PhD Student, ETH Zurich
Graduated PhD Students
Lei Ke
PhD Student, ETH Zurich & HKUST
Christoph Mayer
PhD Student, ETH Zurich
Joakim Johnander
PhD Student, Linköping Univ.
Matthieu Paul
PhD Student, ETH Zurich
Ardhendu Tripathi
PhD Student, ETH Zurich
Andreas Lugmayr
PhD Student, ETH Zurich
Jan-Nico Zäch
PhD Student, ETH Zurich
Goutam Bhat
PhD Student, ETH Zurich
Evangelos Ntavelis
PhD Student, ETH Zurich
Fredrik Gustafsson
PhD Student, Uppsala Univ.
Contact
- martin.danelljan [at] gmail.com
- Mountain View, California