Unveiling the Power of Deep Tracking
Abstract
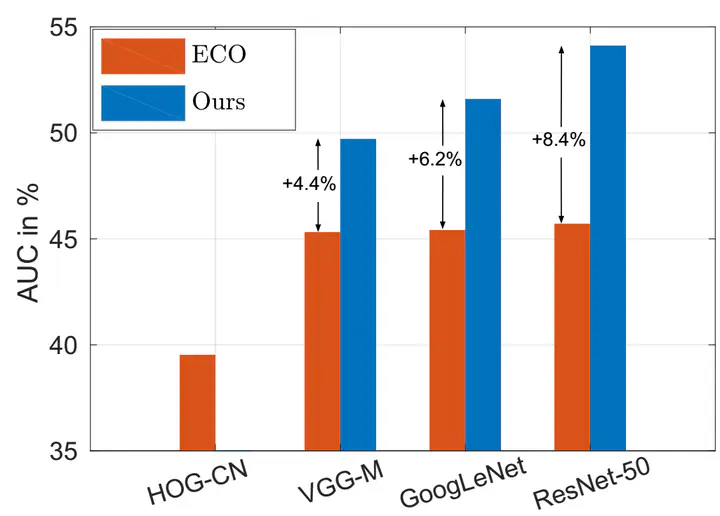
In the field of generic object tracking numerous attempts have been made to exploit deep features. Despite all expectations, deep trackers are yet to reach an outstanding level of performance compared to methods solely based on handcrafted features. In this paper, we investigate this key issue and propose an approach to unlock the true potential of deep features for tracking. We systematically study the characteristics of both deep and shallow features, and their relation to tracking accuracy and robustness. We identify the limited data and low spatial resolution as the main challenges, and propose strategies to counter these issues when integrating deep features for tracking. Furthermore, we propose a novel adaptive fusion approach that leverages the complementary properties of deep and shallow features to improve both robustness and accuracy. Extensive experiments are performed on four challenging datasets. On VOT2017, our approach significantly outperforms the top performing tracker from the challenge with a relative gain of 17% in EAO.